














Köpt oftast
Meest gekocht
Högst betygsatta produkter
Best beoordeelde producten
Rådgivare
Texten nedan är maskinöversatt från tysk originaltext.
Värt att veta om modellbyggelektronik
was är modellbyggeelektronik
was är modellbyggefjärrkontroller?
was är modellbyggesservon
was är modellbygge-reglage?
was är elektronikbyggstenar för modellbygge?
Vilka batterier och vilken laddningsteknik är lämpliga för modellbygge?
was är FPV?
was är modellbyggeelektronik

Modellbyggare som bygger vackra stående modeller med mycket kärlek, som efter sina tillställningar väl skyddad mot damm och grov behandling i ljust belysta vitrinskåp, behöver ingen modellbyggelektronik. Men om en modell ska utrustas med lampor eller om enskilda delar ska röra sig verklighetstroget eller rotera, blir det här intressant. Senast när den färdiga modellen ska styras trådlöst, kommer modellbyggeelektroniken in i spelet.
Nu kan du enkelt skapa olika styr-, styr- och kopplingsfunktioner. Och för detta behövs riktiga hightech-komponenter, som dessutom måste monteras korrekt, anslutas professionellt och även ställas in perfekt.
Alla som redan har haft turen att kasta en blick in i en praktfullt byggd modellbåt, en verklighetstrogen helikopter eller truck- eller Jet-modell vet was vad det innebär.
Men just denna kombination av välbeprövad modellbygge och toppmodern elektronik är det varför RC-modellbygge (radio Controlled = fjärrstyrd) är intressant för så många människor.
was är modellbyggefjärrkontroller?

Oavsett om det gäller modellbåtbyggare, modellbilar, modellflygplan eller funktionsmodellbygge: När en modell ska flyttas verklighetstroget, kommer fjärrstyrningstekniken med i spelet. Det är just på detta område som utvecklingen har gjort enorma framsteg under de senaste åren.
was var det för en tid sedan för ett drama då endast frekvensområdena 27, 35 eller 40 MHz stod till förfogande för styrning av modeller. Förutom frekvensstörningen på grund av de då utbredda CB-radioenheterna har även många modeller genom dubbeltilldelning från sändarkanaler gått till bristning. Många modellbyggare har tvingats visa en mycket hög smärtgräns för att inte förlora lusten med hobby. Men den här katastrofen är nu äntligen över, till glädje för många modellbyggare.
Den nya fjärrstyrningstekniken med 2,4 GHz
Med 2,4 GHz-frekvensbandet och tillgången till tekniskt avancerade sändnings- och mottagningsteknik från WLAN-området var det bara en fråga om tid tills denna smarta teknik även användes för fjärrstyrning av modellbygge. Och med införandet av den nya 2,4 G Hz-fjärrstyrningstekniken har inte bara många av de gamla problemen lösts. Dessutom har vissa nya och mycket intressanta fördelar möjliggjorts:
Högre överföringssäkerhet
Till skillnad från de gamla systemen, som har skickat permanent på en fast kanal, hoppar de nya fjärrstyrningarna mellan kanalerna fram och her och använder endast en av de ca 80 tillgängliga kanalerna för sekunddelar. Det förfarande som kallas Frequency Hopping har den stora fördelen att endast minimal information går förlorad om en kanal skulle störas. Dessutom stöder vissa fjärrkontroller LBT-funktionen (listen Before Talk). Med den här funktionen kontrollerar sändaren först om den nya kanalen verkligen är fri, innan den skickar sin information till mottagaren på frekvensen.
Bättre brusreducering
Eftersom mottagaren är digital ansluten till sändaren reagerar mottagaren endast på signalerna från dess sändare. Parallell drift av flera sändare eller modeller i små utrymmen (t.ex. på en modellflygplats eller vid ett modellbilar) är med 2,4 GHz Hz-fjärrkontroller alltså inget problem längre.
Korrigering av överföringsfel
Genom överföring av ytterligare information kan mottagaren kontrollera att den mottagna signalen är korrekt. Därmed kan mottagaren i modellen endast mata ut korrekt styrinformation till servona, reglaget och elektronikkomponenterna. Modellernas fruktade egenliv på grund av störningar hör därför till det förgångna.
Snabb signalöverföring
På grund av det större antalet överföringskanaler överförs styrningsinformation med större upplösning och med högre hastighet. I kombination med snabba servon är därmed reflexartade styrrörelser, t.ex. vid styrning av snabba modellbilar, möjliga på bråkdelen av en sekund.
Enkel antenninstallation

Eftersom antennerna endast är ca 3 cm långa med en 2,4 GHz sändare kan de lätt "gömmas" i modellen. Modeller som är särskilt realistiska kommer devalvera betydligt om inga långa antenntrådar försämrar utseendet. Dessutom är hanteringen av fjärrstyrningssändaren betydligt enklare med en kort sändarantenn. Utdragbara teleskopantenner som är svåra att knäcka eller bryta finns inte längre.
Användning av returkanal
Högkvalitativa fjärrkontroller för modellbygge överför inte bara styrsignaler från sändare till mottagare i modellen. Via returkanalen överförs information från modellen tillbaka till sändaren. Tillsammans med motsvarande telemetrisensorer kan man i sändardisplayen bland annat visa mottagarens styrka och kvalitet, spänningen för mottagarbatteriet, motortemperaturen eller flyghöjden eller flyghastigheten.
Naturligtvis finns det även vid 2,4 G Hz-fjärrkontroller ett brett utbud som täcker hela bandbredden av användningsmöjligheter. Från den enkla 2-kanals vridknapps-fjärrkontrollen för modellbilar med kostnadseffektiva 4-kanals handstyrningsanläggningar, sträcker sig sortimentet till fullt utrustade händer eller panelsändare, med vilka helikoptrar, jetplan och dyra stora modeller kan styras.

Mottagare med extrafunktioner
Eftersom flera 2,4 GHz-mottagare kan drivas eller kopplas ihop med en 2,4 GHz sändare, använder naturligtvis många modellbyggare alternativet och bygger en egen mottagare i varje modell.
På så sätt kan du snabbt växla mellan modeller på en modellflygplats. Delvis är mottagaren utrustad med två eller till och med 4 mottagningsnivåer med vardera en egen antenn.
Detta har fördelen att varje antenn kan riktas i en annan riktning, så att modellen får perfekt mottagning i alla flyglägen eller situationer.
Dessutom ”packa” tillverkarna ytterligare användbara funktioner i mottagarna. Till exempel har en Gyro-mottagare en inbyggd elektronik med läges- och accelerationssensorer för att t.ex. hålla ett modellflygplan absolut stabilt i alla flyglägen. Plötslig tvärvind vid landning kastar då inte modellen ut ur flygbanan.
was är modellbyggesservon

Vid en sändare omvandlas styrspakens rörelser och de momentana lägena för brytare och vrid-/skjutreglar till elektroniska signaler. Dessa signaler kodas (krypterade) och överförs trådlöst till modellen. I modellen måste den elektroniska styrinformationen tas emot, avkodas och åter omvandlas till en mekanisk rörelse.
För omvandling av en styrsignal till en rörelse har modellservo utvecklats. Förutom elektronik innehåller servon en liten motor, som driver en slitstark spak (spakkors) via en växellåda. Spakens rörelse är proportionell mot styrspaken. Om styrspaken befinner sig i mittläget befinner sig servohorn i mittläget. Om styrspaken förs ner, rör sig servohorn samtidigt i samma riktning.
was tekniskt enkelt från sändarsidan via potentiometer eller hallsensorer, är redan en mycket större utmaning för modellen. Modellbyggare ställer många olika krav på servon i sina modeller:
Storlek och vikt
En servo måste passa till modellen. Många modelltillverkare anger därför redan vid konstruktionen av modellen storleken på servomonterad cache. Men det finns även modeller där valet av servo är fritt val, eftersom de nödvändiga Servofästena eller servona måste skapas av modellbyggaren själv. Av denna anledning erbjuds servon i olika storlekar och former.

Ställmoment och Hållmoment
Nästa viktiga kriterier för en servo är ställmoment och Hållmoment. Det innebär hur mycket kraft en servo skapar för styrning av roder eller styrstänger och hur mycket kraft de styrda elementen hålls i deras läge.
Eftersom konventionella servon har en vridbar utgående spak och därmed omfattas av hävarmslagen, anges värdena i Ncm. En servo med ett ställmoment på 30 Ncm kan lyfta en massa på ca 3 kg när styrpunkten 1 cm befinner sig från vridpunkten på servomspaken.
Ställhastighet
Ställhastigheten är ett annat viktigt kriterium, som utmärker servos av hög kvalitet. Ju mindre tid en servo behöver för att rotera från ett slututslag till ett annat, desto bättre genomförs snabba styrkommandon från sändaren. Men även om t.ex. elektroniska stabiliseringssystem (gyros) används för modellhelikoptrar är det nödvändigt att de anslutna servona snabbt och pålitligt reagerar på de styrpulser som genereras av gyro.
Analog eller digital
Anslutning av en servo till en mottagare sker via en tretrådig kabel. Förutom matningsspänningen (plus och minus) överförs styrningsinformation till den tredje ledaren. Dessutom avger mottagaren 50 gånger per sekund eller var 20:e ms (millisekunder) en styrpuls.
Det låter ganska snabbt i första ögonblicket. Man måste dock ta hänsyn till att styrinformationen från styrspakens och styrspakens styrspakar överförs efter varandra och att pulsbredden beroende på styrspakens läge endast är 0,9–2,1 ms (servo-mittläge = 1,5 ms) (se signal A i kopplingskizze 1). Under återstoden av tiden (19,1 - 17,9 ms) får servon ingen ställinformation och kan därför inte ställa servohorn i rätt läge under den tiden eller hålla det läge som angetts av sändaren.
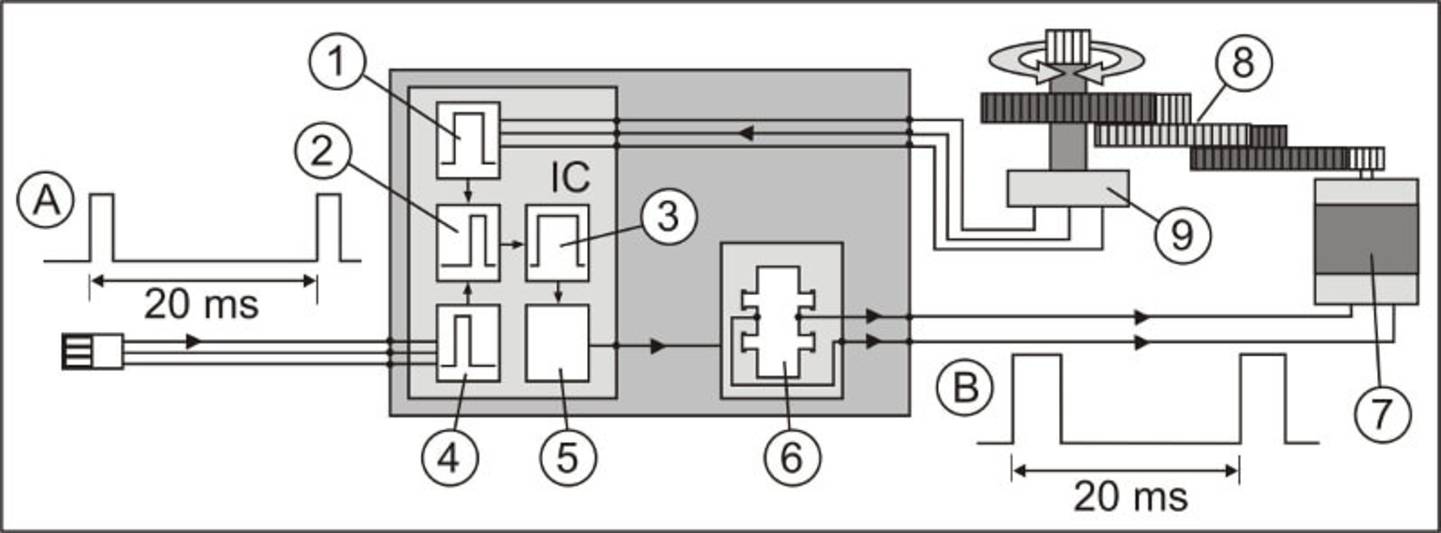
Kopplingskizze 1: Uppbyggnad av en analog servo
- Referensimpulser
- Differentialer
- Pulsstretcher
- Rx-signal
- Skattelogik
- Slutsteg:
- Servomotor
- Servo-växellåda
- Potentiometrar
Kopplingskizzerna 1 visar den schematiska uppbyggnaden av en vanlig analog servo. Man kan tydligt se att servomotorn under en period av 20 ms endast får en regelpuls (se signal B). Ju större avvikelse från servomatspak är- till bör-läge, desto bredare är motorimpulserna. Servospakens momentana läge (är-läge) meddelas kontrollelektroniken via en potentiometer.
En digitalservo är monterad mekaniskt som en analog servo. I stället för de spänningsstyrda reglerstegen används dock en mikroprocessor. Efter digitaliseringen och lagringen av ställinformationen från mottagaren kan processorn nu även styra servomotorn (19,1 - 17.9 ms) för att ställa in servohorn i rätt läge.
På så sätt går digitalservona snabbare, kraftfullare och har enorma hållkraft. Och eftersom minimala avvikelser från börpositionen redan regleras, är digitalservon dessutom betydligt mer exakt att ställa in. Servomotorns vanliga styrning ökar dock även strömbehovet hos servon.
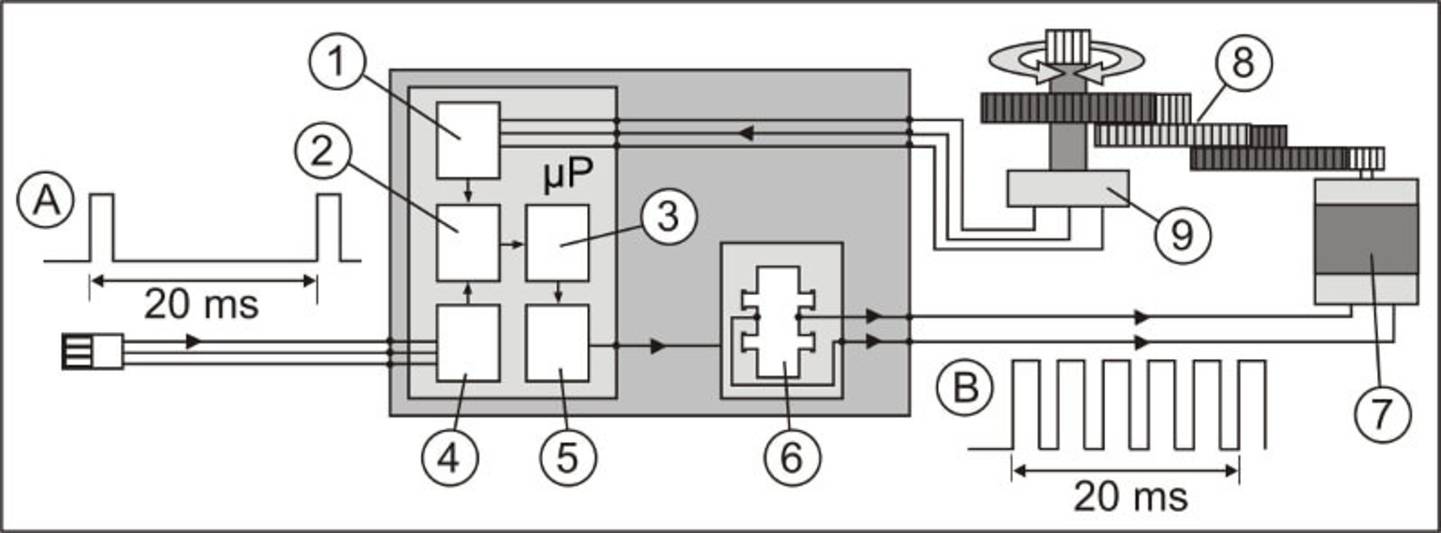
Kopplingskizze 2: Uppbyggnad av en digital-servos
- Analog digital enhet
- Logaritm för regel
- Pulsbreddsgenerator
- Impulsbredmätning
- Skattelogik
- Slutsteg:
- Servomotor
- Servo-växellåda
- Potentiometrar
Kopplingskizzerna 2 visar den schematiska uppbyggnaden av en digital-servo. Man kan tydligt se att servomotorn under en period på 20 ms får mycket mer påstyrning än med en analog servo (se signal B). Även här är pulsbredden återigen beroende på bör-, är-läge för servomspaken.
Vårt praktiska tips
Om flera digitalservos används i en modell, måste strömförsörjningen alltid anpassas. För detta måste starkströmskompatibla batterier och tillräckligt dimensionerade kablar och kontakter användas. På stora och dyra modeller används idag intelligenta batteriväxlar som förser varje servo med tillräcklig ström. För att även ställinformationen till servona ska kunna överföras har batterifiltren rätt mottagaranslutningar.
was är modellbygge-reglage?

Förutom mekanisk styrning av roder eller styrstag är det också nödvändigt att kunna styra motorer med hjälp av fjärrkontrollen. För detta ändamål finns det motorreglage eller varvtalsreglage som styrs på samma sätt som en servo. Detta innebär att motorns varvtal ändras beroende på styrspakens läge på sändaren.
Varvtalsregulator eller varvtalsregulator
Även om det ofta talas om varvtalsregulatorer är det inte alltid en varvtalsregulator utan till största delen en varvtalsregulator. Det innebär: Om sändaren i styrspaken för motorfunktionen ställer in till 50 % av maximal effekt, förser varvtalsregulatorn motorn i modellen med 50 % av batteriets effekt. Oavsett om motorn verkligen arbetar med 50 % av sin effekt eller rör sig snabbare eller långsammare på grund av varierande belastning, kan ett varvtalsreglage inte känna av eller påverka.
En varvtalsregulator däremot registrerar motorns momentana varvtal och reglerar energin till motorn automatiskt, om varvtalet stiger eller sjunker genom ett belastningsbyte. Detta reglerläge (Govener-läge) är viktigt t.ex. för eldrivna modellhelikoptrar, eftersom de ska drivas med ett konstant rotorvarvtal.
Brushed-reglage eller Borstlöst reglage
Vid valet av passande varvtalsgivare ska man först ta hänsyn till motorn. Om motorn är en kollektormotor där strömmen överförs till ankare med två kolborstar (borste = Brush) måste även en borstat regulator användas.
Men de Brushed-motorer har många nackdelar. Kolborstarna använder sig av kontinuerliga underhålls- och växlade funktioner. När motorn är igång uppstår den så kallade borstfyren på borstarna, som kan leda till betydande störningar vid mottagning av fjärrstyrningssignaler.
Därför har allt fler borstlösa motorer slagit igenom inom modellbygge. Dessa motorer fungerar som trefasmotorer, har därför även tre anslutningsledningar och klarar sig utan kolborstar (borstlösa). Därför behöver dessa motorer ett speciellt utformat Borstlöst reglage.
Följande diagram visar skillnaderna mellan de två motortyperna:
Borstad modellbil-motor

På den bakre lagerskylten är hållarna för motorkol inklusive anslutningskabel lätta att se.
Borstlös modellbil-motor

Till skillnad från en borstad motor har borstlösa motorer tre istället för två anslutningskablar.
Hastighetsregulator eller flygregulator
I princip spelar det ingen roll vilken modell som driver en elmotor, men beroende på vilken modell som kräver en varvtalsregulator/varvtalsregulator har reglagen motsvarande prestanda.
I en bil- eller modellbåt är det vettigt att kunna driva drivmotorn i båda riktningarna, men modellflygare sätter inte värde på att propellern även kan vrida tillbaka sin flygmodell.
Här är en förnuftig bromsfunktion mycket viktigare, så att t.ex. med elektrosmogskyddsmodeller stannar propellern direkt och fälls ut bakåt när motorn är avstängd. Om propellern utan motordrivning skulle fortsätta att rotera som en vindhjul, skulle modellen inte kunna övergå till en rimlig segelflygning.
Å andra sidan behöver båtmodellbyggare reglage eller varvtalsreglage som kan kylas med vatten. Därför finns det olika reglage-utföranden.

Tekniska data bör beaktas
Vid val av varvtalsgivare/varvtalregulator är det viktigt att de tekniska uppgifterna beaktas. Under inga omständigheter får den maximala strömmen och den maximala driftspänningen överskridas, men för bilbilmodeller är det ett minimum att varda motorlindningarna (varv*).
Eftersom reglagen till viss del även skyddar Lipo-batterier mot djupurladdning och kan anpassas individuellt till den anslutna motorn, är det viktigt att under installationen ta hänsyn till tillverkare- och programmeringsinformation.
Vår praxistipp
*eftersom strömupptagningen i modellbilar varierar mycket och alltid beror på den aktuella körsituationen, väljer modellbilförare sin varvtalsreglage inte efter strömmen utan efter motorlindningtalet "varv". Ju mindre antalet motorlindningar, desto högre är den ström som motorn kan absorbera. Följaktligen ska regulatorn vara konstruerad så att antalet varv för den motor som används är lika med eller större än antalet varv som regulatorn klarar.
was är elektronikbyggstenar för modellbygge?

Om en modell ska utrustas med mer än bara kör- och styrfunktioner behövs elektronikkomponenter. Med dessa moduler och en hobbyskicksfunktion är det då enkelt att slå på och av positionsljus, strålkastare, reläer eller andra förbrukare med hjälp av fjärrkontrollen. När dessutom ett naturtroget motorljud hörs under motorhuven, är modellbygge i sin allra vackraste form.
Modellens tillförlitliga strömförsörjning via batteriväxel är dock en viktig aspekt. För att förbättra driftsäkerheten för sina modeller, använder många modellbyggare två batterier för strömförsörjning till mottagaren och servon. En batteriväxel övervakar spänningen i båda batterierna och använder alltid batteriet med den högre spänningen för modellens strömförsörjning. Om ett batteri blir fel med en teknisk defekt, kan det andra batteriet fortfarande förse modellen med energi.
Vilka batterier och vilken laddningsteknik är lämpliga för modellbygge?
Modellbyggare behöver inte bara veta allt om sin modell och den inbyggda elektroniken. Modellbyggare känner även till ämnet batterier och laddningsteknik. Det är också absolut nödvändigt, eftersom batterierna förser modellen med livsviktig eller livsviktig energi. Därför lägger många modellbyggare även stort värde på en tillförlitlig strömförsörjning till sina modeller.

NiMH-batterier och batteripack
Vanliga NiMH stavbatterier, t.ex. R6, används i första hand för nybörjarsatser för sändarströmförsörjning. För mottagarströmkällan är svetsade batteripaket i en mängd olika konstruktioner ett bättre val.
Vid de vibrationer som en modell kontinuerligt utsätts för under drift, kan kontakterna i en batteribehållare snabbt leda till avbrott eller glappkontakter.
Följderna av sådana stackande kontakter är att mottagningsanläggningen inte längre är i funktion, vilket kan leda till en total förlust av kontrollen. En mardröm för varje modellbyggare.

Litiumbatterier
Inom området för uppladdningsbara batterier har litiumpolymerbatterier (LiPo) under lång tid tagit slut på NiMH-batterierna. Det är inte så konstigt, eftersom LiPo-batterier har en lägre vikt och en betydligt högre energitäthet än NiMH-batterier.
Men dessa batterier vill behandlas på rätt sätt. En för djup urladdning är lika skadlig som en överladdning. I extrema fall kan batterier med akut brand- och explosionsrisk förstöras mekaniskt.
Därför är det viktigt att vid programmering av varvtalsreglage/ -reglage ställa in batterityp och antal celler. Reglage/reglage stänger sedan av motorn eller minskar effekten vid en hotande djupurladdning.
För att kunna övervaka varje enskild cell under laddningen har LiPo-batterier förutom Starkströmanslutningskablar också speciella balanseranslutningar. Eftersom vissa LiPo-batterier bara är inmantlade med folie, måste man dessutom se till att spets eller vassa föremål inte kan skada bordläggningen.
Vid korrekt behandling ger LiPo-batterier långvarig flygglädje.

Blybatterier
Men den som tror att det i tider av litiumbatterier och borstlösa motorer inte längre behövs gamla beprövade blybatterier misstar sig. Modellbåtbyggare använder gärna blybatterier, eftersom de å ena sidan är högkapacitiva och å andra sidan också kostnadseffektiva. Dessutom behöver du batteriernas höga vikt, så att modellfartyg får rätt vattenstatus.
Även fans av modeller med metanol-förbränningsmotorer använder gärna blybatterier. En gång som strömförsörjning för tändstift eller för strömförsörjning av elstartaren. På så sätt används företrädesvis blygelbatterier, eftersom dessa batterier är läckagesäkra och kan användas oberoende av läge.
Till viss del används även stora blybatterier för att snabbt ladda upp kör- eller flygbatterier på fri fot, där det inte finns någon strömanslutning.
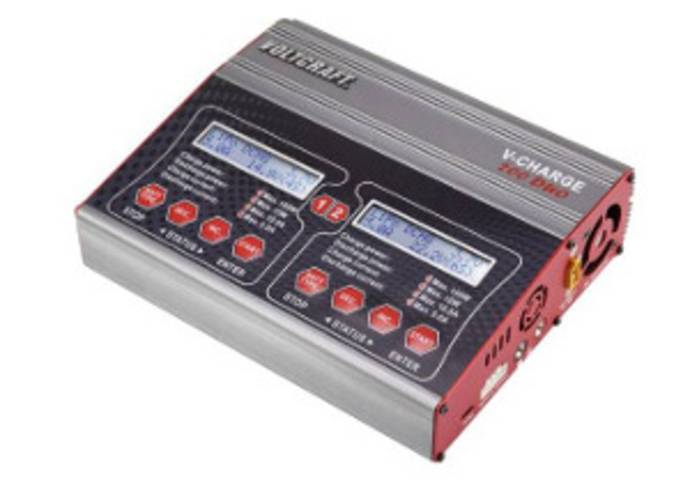
Modellbyggeladdare
Till skillnad från vanliga laddare för stavbatterier som finns i alla hushåll utmärker sig modellbyggsladdare genom att de kan ladda flercelliga batteripaket. Dessutom är laddarna utformade så att de även kan ladda och ladda ur batterier med olika tekniker som NiCd, NiMH, LiPo, LiIon, LiFePO eller bly.
Inte bara det. Många modellbyggare använder utbytbara batterier för att kunna driva sin modell även utan långa pauser. I detta fall är det praktiskt när laddaren kan ladda två eller flera batterier samtidigt.
Och för att batterierna ska kunna laddas snabbt igen arbetar laddaren med delvis mycket höga laddningsströmmar. Därtill måste naturligtvis laddningskabeln och kontakterna till batterierna passa perfekt, annars kan det mycket snabbt komma till kontaktfel och skador.
Eftersom modellbyggare använder sina laddare både hemma och på resan, har många av enheterna förutom en 230 V-anslutning även en 12 V-anslutning.
På så sätt kan bilbatteriet användas som spänningskälla när du är på resande fot. Å andra sidan har vissa Clubhemee, som måste klara sig utan 230 V-strömanslutning, kraftfulla 12 V-solcellsanläggningar, som laddarna också kan anslutas till. Laddare som bara har en 12 V-anslutning, drivs enkelt hemma med kraftfulla 12 V-nätenheter.
was är FPV?
Förkortningen FPV står för First person View och innebär i detta sammanhang så mycket som blicken från modellens cockpit. I princip möjliggör FPV det som modellbyggare drömt om i många år. Du ser nu exakt hur det skulle vara om du själv kunde flyga med din modell eller hur det känns när du själv ser genom vindrutan på din modellbil.
Dessutom installeras små, lätta och kraftfulla kameror i modellen, som trådlöst överför dina bildsignaler till en mottagare. Bilderna kan sedan visas på en smartphone, surfplatta eller en bildskärm.
Om modellpioten vill styra sin modell enbart ur cockpitvyn, har monitorglasögonen visat sig vara mycket välbeprövade. Det krävs dock lite övning innan man har vant sig vid den ohema synen. I första hand är coptern eller dronen utrustade med kameror, och här måste rättsliga bestämmelser följas.
Rättsliga förutsättningar för FPV-flygning
Generellt får drönare eller Copter endast flygas vid siktvidd. Det innebär att piloten på sändaren måste se sin drönare när som helst. Därför får han inte flyga för långt eftersom det annars inte går att tydligt identifiera flygläget.
Videoglasögon får endast användas om flygningen är upp till en höjd av 30 meter och flygplanet inte är tyngre än 0,25 kg eller om en annan person kontinuerligt bevakar det inom synhåll och kan göra styraren uppmärksam på riskerna. Detta ska anses vara en verksamhet inom styrarens synfält.
Kungsklassen i FPV-flygning
Under tiden har FPV-flygning slagit igenom även på racingscenen. Här används kraftfulla Racecopter för att flyga gåtande snabbt genom parkeringshus eller locka tiotusentals besökare vid stora tävlingsarrangemang på episka platser, som t.ex. i Drone Champions League (DCL).